
MonsterBorg - The ultimate Pi robot
Drive your MonsterBorg from a smart phone or web browser
One of the best things about building your own robot is being able to control it remotely. Using MonsterBorg with a Raspberry Pi camera you can drive around and see what the robot sees from a smart phone, laptop, or even via the web!
In this example we will show how you can control your MonsterBorg using a web page accessed via WiFi. This can then be controlled from any device with a web browser on the same WiFi network :)
Parts
In order to run this script you will not need much:
- A MonsterBorg
- A Raspberry Pi camera so the robot can see
- Connection to a WiFi router or phone hotspot
IP address
To talk to the MonsterBorg you will need to know what address to use. You can find out what your IP address is using the ifconfig command in a terminal. It should be four numbers separated by dots, e.g. 192.168.0.198 We will need this to access the controls, so make a note of it.
Controls
The controls are fairly straight forward, one slider and some buttons:
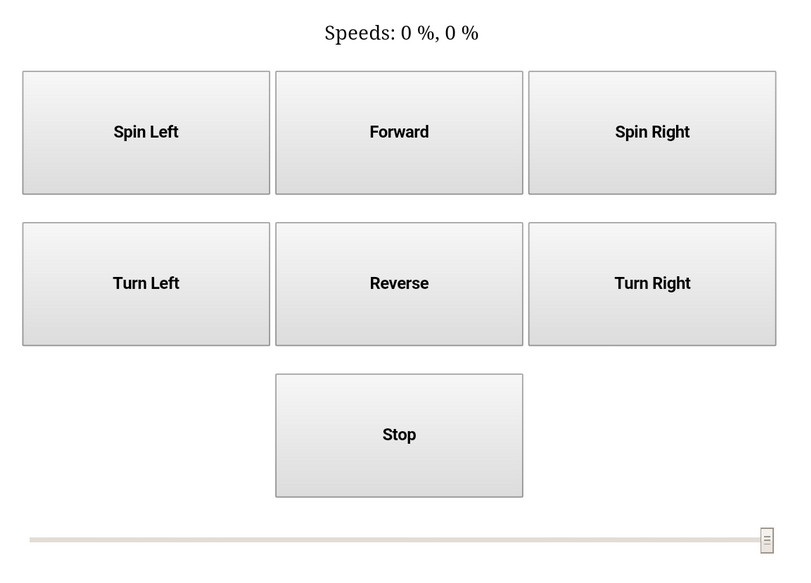
Each of the buttons will start the robot moving in a specific direction:
- Forward → Drive straight ahead
- Reverse → Drive backwards
- Spin Left → Rotate anti-clockwise on the spot
- Spin Right → Rotate clockwise on the spot
- Turn Left → Steer towards the left
- Turn Right → Steer towards the right
- Stop → Stop moving
The slider controls what speed the MonsterBorg moves at, fully right is full speed. The new speed will take effect when you press a button.
Led indicator
When the script is running the ThunderBorg on-board LED will be in one of two states:
- When connected the LED will indicate battery level between green and red
- When not connected the LED will be blue instead
For the standard 10x rechargeable AA battery pack we have found having the battery monitoring range set as 9.5 to 13.5 V works well: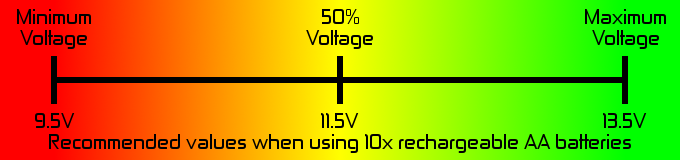
These values can be set using the ~/thunderborg/tbSetBatteryLimits.py script.
Get the example
The example is part of the standard set of MonsterBorg examples installed during the getting started instructions: bash <(curl https://www.piborg.org/install-monsterborg.txt)
Run once
Go to the MonsterBorg code directory:cd ~/monsterborg
and run the script using sudo:sudo ./monsterWeb.py
Run at startup
Open /etc/rc.local to make an addition using:sudo nano /etc/rc.local
Then add this line just above the exit 0 line:sudo /home/pi/monsterborg/monsterWeb.py &
Finally press CTRL+O, ENTER to save the file followed by CTRL+X to exit nano.
Next time you power up the Raspberry Pi it should start the script for you :)
Accessing the page
Once the script is running you can access the controls from a web browser on any other device on the same network. Replace 192.168.0.198 in the below addresses with the IP address from your DiddyBorg v2:
http://192.168.0.198- Standard controls, click to change speed or directionhttp://192.168.0.198/hold- Press and hold controls to keep moving, may not work on all deviceshttp://192.168.0.198/stream- Gets the video stream without any controlshttp://192.168.0.198/cam.jpg- Single frame from the camera, you may need to force-refresh to get a new image
Full code listing - monsterWeb.py
#!/usr/bin/env python
# coding: Latin-1
# Creates a web-page interface for MonsterBorg
# Import library functions we need
import ThunderBorg
import time
import sys
import threading
import SocketServer
import picamera
import picamera.array
import cv2
import datetime
# Settings for the web-page
webPort = 80 # Port number for the web-page, 80 is what web-pages normally use
imageWidth = 240 # Width of the captured image in pixels
imageHeight = 192 # Height of the captured image in pixels
frameRate = 30 # Number of images to capture per second
displayRate = 10 # Number of images to request per second
photoDirectory = '/home/pi' # Directory to save photos to
flippedCamera = True # Swap between True and False if the camera image is rotated by 180
jpegQuality = 80 # JPEG quality level, smaller is faster, higher looks better (0 to 100)
# Global values
global TB
global lastFrame
global lockFrame
global camera
global processor
global running
global watchdog
running = True
TB = ThunderBorg.ThunderBorg()
#TB.i2cAddress = 0x15 # Uncomment and change the value if you have changed the board address
TB.Init()
if not TB.foundChip:
boards = ThunderBorg.ScanForThunderBorg()
if len(boards) == 0:
print 'No ThunderBorg found, check you are attached :)'
else:
print 'No ThunderBorg at address %02X, but we did find boards:' % (TB.i2cAddress)
for board in boards:
print ' %02X (%d)' % (board, board)
print 'If you need to change the I²C address change the setup line so it is correct, e.g.'
print 'TB.i2cAddress = 0x%02X' % (boards[0])
sys.exit()
TB.SetCommsFailsafe(False)
TB.SetLedShowBattery(False)
TB.SetLeds(0,0,1)
# Power settings
voltageIn = 1.2 * 10 # Total battery voltage to the ThunderBorg
voltageOut = 12.0 * 0.95 # Maximum motor voltage, we limit it to 95% to allow the RPi to get uninterrupted power
# Setup the power limits
if voltageOut > voltageIn:
maxPower = 1.0
else:
maxPower = voltageOut / float(voltageIn)
# Timeout thread
class Watchdog(threading.Thread):
def __init__(self):
super(Watchdog, self).__init__()
self.event = threading.Event()
self.terminated = False
self.start()
self.timestamp = time.time()
def run(self):
timedOut = True
# This method runs in a separate thread
while not self.terminated:
# Wait for a network event to be flagged for up to one second
if timedOut:
if self.event.wait(1):
# Connection
print 'Reconnected...'
TB.SetLedShowBattery(True)
timedOut = False
self.event.clear()
else:
if self.event.wait(1):
self.event.clear()
else:
# Timed out
print 'Timed out...'
TB.SetLedShowBattery(False)
TB.SetLeds(0,0,1)
timedOut = True
TB.MotorsOff()
# Image stream processing thread
class StreamProcessor(threading.Thread):
def __init__(self):
super(StreamProcessor, self).__init__()
self.stream = picamera.array.PiRGBArray(camera)
self.event = threading.Event()
self.terminated = False
self.start()
self.begin = 0
def run(self):
global lastFrame
global lockFrame
# This method runs in a separate thread
while not self.terminated:
# Wait for an image to be written to the stream
if self.event.wait(1):
try:
# Read the image and save globally
self.stream.seek(0)
if flippedCamera:
flippedArray = cv2.flip(self.stream.array, -1) # Flips X and Y
retval, thisFrame = cv2.imencode('.jpg', flippedArray, [cv2.IMWRITE_JPEG_QUALITY, jpegQuality])
del flippedArray
else:
retval, thisFrame = cv2.imencode('.jpg', self.stream.array, [cv2.IMWRITE_JPEG_QUALITY, jpegQuality])
lockFrame.acquire()
lastFrame = thisFrame
lockFrame.release()
finally:
# Reset the stream and event
self.stream.seek(0)
self.stream.truncate()
self.event.clear()
# Image capture thread
class ImageCapture(threading.Thread):
def __init__(self):
super(ImageCapture, self).__init__()
self.start()
def run(self):
global camera
global processor
print 'Start the stream using the video port'
camera.capture_sequence(self.TriggerStream(), format='bgr', use_video_port=True)
print 'Terminating camera processing...'
processor.terminated = True
processor.join()
print 'Processing terminated.'
# Stream delegation loop
def TriggerStream(self):
global running
while running:
if processor.event.is_set():
time.sleep(0.01)
else:
yield processor.stream
processor.event.set()
# Class used to implement the web server
class WebServer(SocketServer.BaseRequestHandler):
def handle(self):
global TB
global lastFrame
global watchdog
# Get the HTTP request data
reqData = self.request.recv(1024).strip()
reqData = reqData.split('\n')
# Get the URL requested
getPath = ''
for line in reqData:
if line.startswith('GET'):
parts = line.split(' ')
getPath = parts[1]
break
watchdog.event.set()
if getPath.startswith('/cam.jpg'):
# Camera snapshot
lockFrame.acquire()
sendFrame = lastFrame
lockFrame.release()
if sendFrame != None:
self.send(sendFrame.tostring())
elif getPath.startswith('/off'):
# Turn the drives off
httpText = '<html><body><center>'
httpText += 'Speeds: 0 %, 0 %'
httpText += '</center></body></html>'
self.send(httpText)
TB.MotorsOff()
elif getPath.startswith('/set/'):
# Motor power setting: /set/driveLeft/driveRight
parts = getPath.split('/')
# Get the power levels
if len(parts) >= 4:
try:
driveLeft = float(parts[2])
driveRight = float(parts[3])
except:
# Bad values
driveRight = 0.0
driveLeft = 0.0
else:
# Bad request
driveRight = 0.0
driveLeft = 0.0
# Ensure settings are within limits
if driveRight < -1:
driveRight = -1
elif driveRight > 1:
driveRight = 1
if driveLeft < -1:
driveLeft = -1
elif driveLeft > 1:
driveLeft = 1
# Report the current settings
percentLeft = driveLeft * 100.0;
percentRight = driveRight * 100.0;
httpText = '<html><body><center>'
httpText += 'Speeds: %.0f %%, %.0f %%' % (percentLeft, percentRight)
httpText += '</center></body></html>'
self.send(httpText)
# Set the outputs
driveLeft *= maxPower
driveRight *= maxPower
TB.SetMotor1(driveRight)
TB.SetMotor2(driveLeft)
elif getPath.startswith('/photo'):
# Save camera photo
lockFrame.acquire()
captureFrame = lastFrame
lockFrame.release()
httpText = '<html><body><center>'
if captureFrame != None:
photoName = '%s/Photo %s.jpg' % (photoDirectory, datetime.datetime.utcnow())
try:
photoFile = open(photoName, 'wb')
photoFile.write(captureFrame)
photoFile.close()
httpText += 'Photo saved to %s' % (photoName)
except:
httpText += 'Failed to take photo!'
else:
httpText += 'Failed to take photo!'
httpText += '</center></body></html>'
self.send(httpText)
elif getPath == '/':
# Main page, click buttons to move and to stop
httpText = '<html>\n'
httpText += '<head>\n'
httpText += '<script language="JavaScript"><!--\n'
httpText += 'function Drive(left, right) {\n'
httpText += ' var iframe = document.getElementById("setDrive");\n'
httpText += ' var slider = document.getElementById("speed");\n'
httpText += ' left *= speed.value / 100.0;'
httpText += ' right *= speed.value / 100.0;'
httpText += ' iframe.src = "/set/" + left + "/" + right;\n'
httpText += '}\n'
httpText += 'function Off() {\n'
httpText += ' var iframe = document.getElementById("setDrive");\n'
httpText += ' iframe.src = "/off";\n'
httpText += '}\n'
httpText += 'function Photo() {\n'
httpText += ' var iframe = document.getElementById("setDrive");\n'
httpText += ' iframe.src = "/photo";\n'
httpText += '}\n'
httpText += '//--></script>\n'
httpText += '</head>\n'
httpText += '<body>\n'
httpText += '<iframe src="/stream" width="100%" height="500" frameborder="0"></iframe>\n'
httpText += '<iframe id="setDrive" src="/off" width="100%" height="50" frameborder="0"></iframe>\n'
httpText += '<center>\n'
httpText += '<button onclick="Drive(-1,1)" style="width:200px;height:100px;"><b>Spin Left</b></button>\n'
httpText += '<button onclick="Drive(1,1)" style="width:200px;height:100px;"><b>Forward</b></button>\n'
httpText += '<button onclick="Drive(1,-1)" style="width:200px;height:100px;"><b>Spin Right</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<button onclick="Drive(0,1)" style="width:200px;height:100px;"><b>Turn Left</b></button>\n'
httpText += '<button onclick="Drive(-1,-1)" style="width:200px;height:100px;"><b>Reverse</b></button>\n'
httpText += '<button onclick="Drive(1,0)" style="width:200px;height:100px;"><b>Turn Right</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<button onclick="Off()" style="width:200px;height:100px;"><b>Stop</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<button onclick="Photo()" style="width:200px;height:100px;"><b>Save Photo</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<input id="speed" type="range" min="0" max="100" value="100" style="width:600px" />\n'
httpText += '</center>\n'
httpText += '</body>\n'
httpText += '</html>\n'
self.send(httpText)
elif getPath == '/hold':
# Alternate page, hold buttons to move (does not work with all devices)
httpText = '<html>\n'
httpText += '<head>\n'
httpText += '<script language="JavaScript"><!--\n'
httpText += 'function Drive(left, right) {\n'
httpText += ' var iframe = document.getElementById("setDrive");\n'
httpText += ' var slider = document.getElementById("speed");\n'
httpText += ' left *= speed.value / 100.0;'
httpText += ' right *= speed.value / 100.0;'
httpText += ' iframe.src = "/set/" + left + "/" + right;\n'
httpText += '}\n'
httpText += 'function Off() {\n'
httpText += ' var iframe = document.getElementById("setDrive");\n'
httpText += ' iframe.src = "/off";\n'
httpText += '}\n'
httpText += 'function Photo() {\n'
httpText += ' var iframe = document.getElementById("setDrive");\n'
httpText += ' iframe.src = "/photo";\n'
httpText += '}\n'
httpText += '//--></script>\n'
httpText += '</head>\n'
httpText += '<body>\n'
httpText += '<iframe src="/stream" width="100%" height="500" frameborder="0"></iframe>\n'
httpText += '<iframe id="setDrive" src="/off" width="100%" height="50" frameborder="0"></iframe>\n'
httpText += '<center>\n'
httpText += '<button onmousedown="Drive(-1,1)" onmouseup="Off()" style="width:200px;height:100px;"><b>Spin Left</b></button>\n'
httpText += '<button onmousedown="Drive(1,1)" onmouseup="Off()" style="width:200px;height:100px;"><b>Forward</b></button>\n'
httpText += '<button onmousedown="Drive(1,-1)" onmouseup="Off()" style="width:200px;height:100px;"><b>Spin Right</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<button onmousedown="Drive(0,1)" onmouseup="Off()" style="width:200px;height:100px;"><b>Turn Left</b></button>\n'
httpText += '<button onmousedown="Drive(-1,-1)" onmouseup="Off()" style="width:200px;height:100px;"><b>Reverse</b></button>\n'
httpText += '<button onmousedown="Drive(1,0)" onmouseup="Off()" style="width:200px;height:100px;"><b>Turn Right</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<button onclick="Photo()" style="width:200px;height:100px;"><b>Save Photo</b></button>\n'
httpText += '<br /><br />\n'
httpText += '<input id="speed" type="range" min="0" max="100" value="100" style="width:600px" />\n'
httpText += '</center>\n'
httpText += '</body>\n'
httpText += '</html>\n'
self.send(httpText)
elif getPath == '/stream':
# Streaming frame, set a delayed refresh
displayDelay = int(1000 / displayRate)
httpText = '<html>\n'
httpText += '<head>\n'
httpText += '<script language="JavaScript"><!--\n'
httpText += 'function refreshImage() {\n'
httpText += ' if (!document.images) return;\n'
httpText += ' document.images["rpicam"].src = "cam.jpg?" + Math.random();\n'
httpText += ' setTimeout("refreshImage()", %d);\n' % (displayDelay)
httpText += '}\n'
httpText += '//--></script>\n'
httpText += '</head>\n'
httpText += '<body onLoad="setTimeout(\'refreshImage()\', %d)">\n' % (displayDelay)
httpText += '<center><img src="/cam.jpg" style="width:600;height:480;" name="rpicam" /></center>\n'
httpText += '</body>\n'
httpText += '</html>\n'
self.send(httpText)
else:
# Unexpected page
self.send('Path : "%s"' % (getPath))
def send(self, content):
self.request.sendall('HTTP/1.0 200 OK\n\n%s' % (content))
# Create the image buffer frame
lastFrame = None
lockFrame = threading.Lock()
# Startup sequence
print 'Setup camera'
camera = picamera.PiCamera()
camera.resolution = (imageWidth, imageHeight)
camera.framerate = frameRate
print 'Setup the stream processing thread'
processor = StreamProcessor()
print 'Wait ...'
time.sleep(2)
captureThread = ImageCapture()
print 'Setup the watchdog'
watchdog = Watchdog()
# Run the web server until we are told to close
try:
httpServer = None
httpServer = SocketServer.TCPServer(("0.0.0.0", webPort), WebServer)
except:
# Failed to open the port, report common issues
print
print 'Failed to open port %d' % (webPort)
print 'Make sure you are running the script with sudo permissions'
print 'Other problems include running another script with the same port'
print 'If the script was just working recently try waiting a minute first'
print
# Flag the script to exit
running = False
try:
print 'Press CTRL+C to terminate the web-server'
while running:
httpServer.handle_request()
except KeyboardInterrupt:
# CTRL+C exit
print '\nUser shutdown'
finally:
# Turn the motors off under all scenarios
TB.MotorsOff()
print 'Motors off'
# Tell each thread to stop, and wait for them to end
if httpServer != None:
httpServer.server_close()
running = False
captureThread.join()
processor.terminated = True
watchdog.terminated = True
processor.join()
watchdog.join()
del camera
TB.SetLedShowBattery(False)
TB.SetLeds(0,0,0)
TB.MotorsOff()
print 'Web-server terminated.'

