
Crash Thunderborg / The 5V supply has large fluctuations.
Forums:
I have problems with the acceleration of the engines that Thunderborg gets stuck.
The motors turn without load. After about 2-15 seconds the crash comes.
Both motors consume approx.2.5A together. I use 18V 5A Lions batteries from Bosch drills.
The motors can no longer be controlled and run at the last speed before the crash.
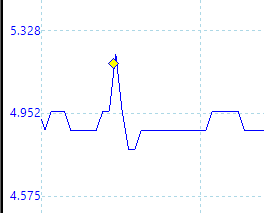
One suspicion is that it is the cause of the 5V fluctuations. See image.
I've spent a few hours troubleshooting.
All attempts with capacitors and others,have been unsuccessful.
I soon have no idea what the problem could be.
Images:
- Log in to post comments


piborg
Tue, 05/26/2020 - 22:46
Permalink
Motor drain on batteries
It is possible that the motors are using enough power that the 5V regulator cannot get enough to keep a stable output.
The first thing to check is if the problem persists when the batteries are fully charged. We often see problems like this when batteries are starting to get low.
If that is not the problem it would help to know more, specifically:
Patrik Rindlisbacher
Tue, 05/26/2020 - 23:00
Permalink
Motor
DSMP420 Motors See Images
The battery is full and new.
thank you for the fast reaction.
piborg
Wed, 05/27/2020 - 00:08
Permalink
Motors
I have had a quick look and this seems to be the motor datasheet: https://asset.conrad.com/media10/add/160267/c1/-/en/000191824DS02/datash...
The first note is that the motors have a maximum current draw of 5.5A. This means that harsh change in motor power may try and draw too much current from the battery, which may explain your problem. Ramping the speed up/down instead of instant jumps may prevent the issue.
The second note is you have an 18V battery with 12V motors. To run the motors within their rated limit you should keep to a maximum of 66% (2/3) power on the ThunderBorg. Since you are talking directly to the board with I2C this would be values between 0 and 170. Running the motors above this will shorten their lifespan and increase their power usage.
Patrik Rindlisbacher
Tue, 05/26/2020 - 23:03
Permalink
Software
https://github.com/PatrikRindlisbacher/cle.ch_ThunderBorg_Arduino_Class
I wrote an Arduino class. :-)
Patrik Rindlisbacher
Thu, 05/28/2020 - 20:58
Permalink
Thank you for the extensive
Thank you for the extensive answer.
Your direction of solution is the right one.
When the performance is reduced, the crash occurs less frequently.
In my test, the motors are almost unloaded and I accelerate on a ramp. (1 to 4 Sek. max 1.5A per Motor)
--> 12V mit PWM 170 / ramp > 1 Sek. is OK
--> 12V mit PWM 200 / ramp > 1 Sek. is OK
--> 12V mit PWM 255 / ramp > 1 Sek. is OK
--> 12V mit PWM 255 / ramp < 1 Sek. is Not OK
Do you think the Diablo board could solve the problems?
piborg
Fri, 05/29/2020 - 14:16
Permalink
The battery is probably the limitaion
If the problem is that the battery is struggling to deliver enough power for both motors and the 5V regulator then changing the motor drive board will not help.
We have seen this sort of problem before where running motors at 100% output causes the 5V regulator to struggle to get enough power to maintain a steady output. We usually solve this by limiting the output to 95%.
I would try the same test with 12V and a 240 limit (~94%) and see if that behaves better.
Another fix would be to use a higher voltage battery with a lower limit to get 12V for the motors (e.g. 18V and 170 limit). This makes it easier for the battery to provide enough power output in most cases.