
2x Tunderborg + 2x stepper
Forums:
I wish to control two steppers, and so have two Tunderborg's.
I'm powering my Pi Zero with one them, and have the 2nd connected to the 1st.
Now the described method of finding the addresses would not work.
So, should I do so with the Pi on it's own power and have the Tunderborgs powered each one by one when discovering?
Or, am I supposed to better use 2x 6 GPIO's of the Pi?
- Log in to post comments


piborg
Fri, 08/18/2017 - 10:36
Permalink
Setting up two ThunderBorgs
Before connecting both you need to set the addresses in both boards separately. I would suggest the following sequence:
If everything has worked you should see the two addresses chosen at the end of the last step, e.g:
Remember that the ThunderBorg must be attached to the first 6 pins of the GPIO header:
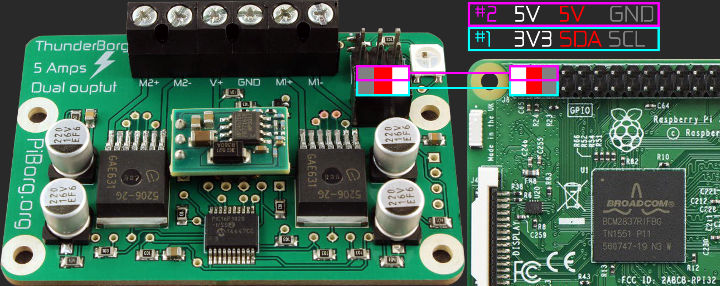
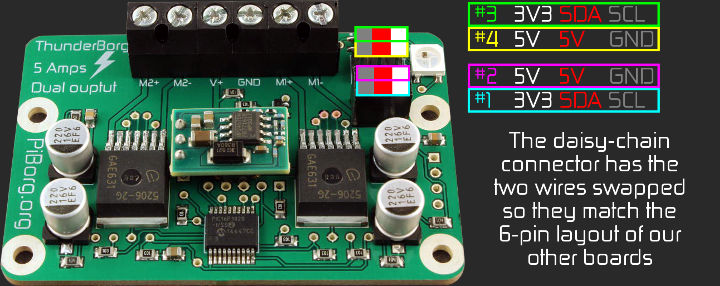
Also the male and female 6-pin connections on the ThunderBorg are swapped:
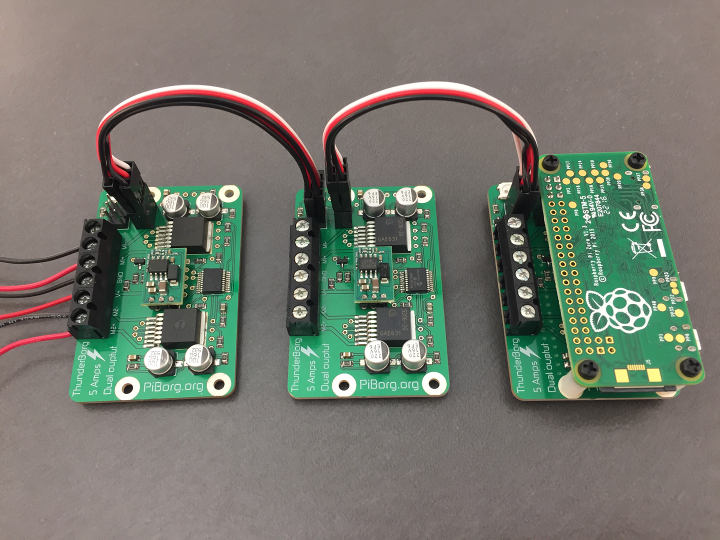
If possible this is our recommended layout for connecting multiple ThunderBorgs to a single Pi Zero:
Leo
Sun, 08/20/2017 - 20:48
Permalink
Went fine
Hi,
At first approach I didn't it imagine it would work like this, but after simply following the step-by-step instructions it does work.
So, I'm now able to operate each engine separately.
Thanks.
fedonman
Mon, 06/04/2018 - 14:59
Permalink
Hi! Should I use a separate
Hi! Should I use a separate power supply for each thunderborg?
piborg
Mon, 06/04/2018 - 17:50
Permalink
It depends on the supply and the motors
If your power supply can handle the load when powering motors on both ThunderBorgs at once then they can happily be both connected in parallel to the same supply.
If the supply is not powerful enough then you will need two separate supplies instead.
fedonman
Tue, 06/12/2018 - 10:17
Permalink
More info
Hi again,
I will provide you with all the info.
The two stepper motors are 1.5A each and I am connecting everything to Raspberry PI 3 B+. You can find full specs of motors in the image provided.
Can you tell me the optimal power supply needed? Batteries are not an option so DC only. I don't care about the number of the power supplies although the less the better. Ideally one for thunderborgs and a separate one for raspberry. But I would like you to provide me with a sketch of cable connections, please. :) Sorry i am programmer but noob in electronics.
Thank you!
piborg
Tue, 06/12/2018 - 18:28
Permalink
Power supply for two steppers
If you find a supply which is 7V or higher and rated for 5A or more then you should be able to wire the supply to both ThunderBorgs in parallel and control everything from a single supply.
If wiring them in parallel the easiest way I have found is to run a pair of cables from the supply + and - to V+ and GND on the first ThunderBorg, then a second pair between the two ThunderBorgs (V+ to V+, GND to GND). See diagram at the bottom of the post.
It is possible to power the Raspberry Pi separately, but the wiring is much simpler if it is powered via the 5V from the ThunderBorgs.
You will want to limit the voltage output to the steppers on both ThunderBorgs to prevent them from overheating. The output power can be calculated from the motor specifications and the voltage of the power supply used.
If you are using the
tbStepper.pyexample then the values you need to change will bemaxPowerandholdingPower.First you want to set
maxPowerbased on this equation:For example with your stepper and a 12 V supply this would be:
For
holdingPoweryou want to be lower thanmaxPower, you only need enough to hold the motor still. I generally go for half the value ofmaxPower. If you do not need any power applied when the steppers are not moving you can setholdingPowerto 0 to reduce the power usage :)fedonman
Thu, 06/14/2018 - 11:28
Permalink
You, sir, deserve a medal!
You, sir, deserve a medal! Thank you very much! I picked a 12V 6.25A power supply. I will get back to you on the results.
Quick question: I am using a TriBorg to extend raspberry. Is it OK to use the rest 5V pins for powering sensors if I am also using it to power raspberry from thunderborg?
piborg
Thu, 06/14/2018 - 17:24
Permalink
Adding 5V sensors
Generally speaking you should be able to add sensors to the 5V pins on the GPIO as long as they do not use too much power.
Since you have two ThunderBorgs each with a 1.5A DC/DC powering the 5V lines there should be plenty of spare power in most cases :)