
Connecting an UltraBorg to a MonsterBorg and RPi (Power and Signal Question)
Forums:
OK so I have a MonsterBorg / ThunderBorg which is currently sat on top of a Raspberry Pi 3 GPIO. We also bought an Ultraborg because we need to use some HCSR04 sensors and a servo.
With the ThunderBorg connected to the Pi in its default setup (directly connected to the GPIO) I guess we cannot use the UltraBorg.
If we separate the Pi from the ThunderBorg can we daisy chain the Pi to the ThunderBorg and then onto the UltraBorg?
Do we need a separate power supply for the UltraBorg or should we separate the Power from the Pi / ThunderBorg and have a separate power supply for the Pi itself.
I am considering switching out to a LiPo - what voltage LiPo with the ThunderBorg take to supply ample power to:
The 4 x 300 RPM Motors
4 x HCSR04 Sensors
2 x Servos
RPi
- Log in to post comments


piborg
Sat, 12/23/2017 - 19:33
Permalink
Connecting both boards
Yes, you can connect the ThunderBorg to the first 6 GPIO pins on the Pi by cables, then daisy-chain the UltraBorg to the ThunderBorg using cables as well.
You can power the UltraBorg directly from the ThunderBorg, but this will mean the servos are using the same 5V as the Pi. If the servos need too much power then the 5V regulator on the ThunderBorg may not be able to supply everything at once, causing the Pi to reset.
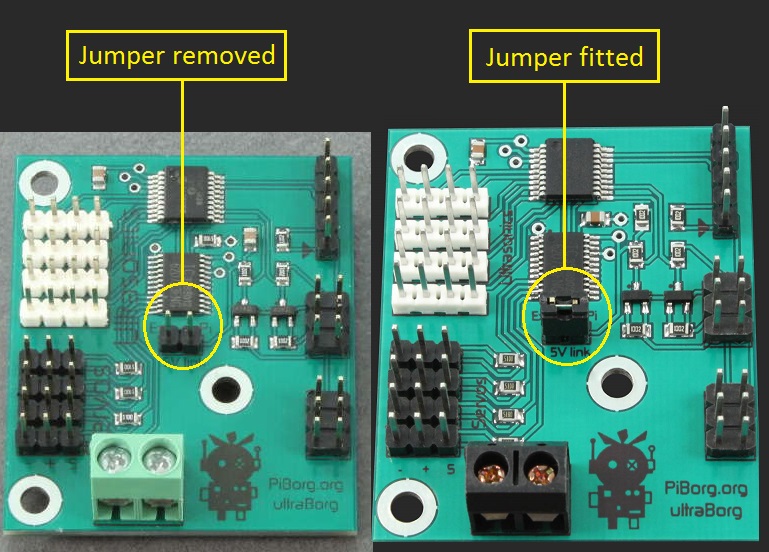
We would recommend a small 5V source for the UltraBorg power, remembering to remove the 5V link jumper :) A 4x AA pack with rechargeables will be good enough for most servos, alternatively a cheap UBEC or a BattBorg connected to the battery pack will be fine to run the servos from.
As for a LiPo to run everything you will want more than 12V to get the full motor speed, so a 4S (14.8V) is probably the best choice. Remember to protect your LiPo from physical damage when it is mounted!
JonnyAlpha
Sat, 03/10/2018 - 18:00
Permalink
It's been quite a while since
It's been quite a while since I posted this but I now have a 14.8v LiPo and I need to refresh my memory on power requirements.
Would it be possible for some help with this - details below.
We have a MonsterBorg Chassis with the ThunderBorg Motor Driver Board and a Raspberry Pi 3 running it all. As stated in this thread we have now successfully connected an Ultraborg.
I have printed some HCSR04 holders and now have a couple mounted on the chassis as well as a HiTech HS300 Servo that I had lying around (temp setup) .
The final config will be 4 HCSR04 (front, Rear, Left and Right) and at probably 2 Servos (One for self righting and the other two for elevation and rotation of the a modified Nerf Gun).
Currently the Pi and the Motors are powered from the ThunderBorg.
Questions:
1. With the 14.8v battery, can we power everything? If so how do we hook up the 5v in on the UltraBorg.
2. If the answer to Q1 is no then I guess we need a separate 4 x AA for the UltraBorg.
3. You mentioned above that alternatively a UBEC or a BattBorg connected to the BatteryPack would be fine for the Servos - we have a BattBorg but which battery pack are you referring to? The 4 x AA or the LiPo - if so how do we do this?
Sorry for so many questions :-)
piborg
Sat, 03/10/2018 - 20:14
Permalink
Two choices
You have two choices for your setup that only need the single 14.8V battery, which one is best will depend on how much power the servos need when moving.
Option 1: Use the DC/DC on the ThunderBorg to power all of the 5V devices.
In this case all you need to do is keep everything as-is. With the 5V link jumper attached to the UltraBorg the servos and ultrasonics will all get their power from the 5V lines on the 3-pin cables.
The downside to this is that if a servo consumes too much power when it moves it might cause the 5V line to dip, causing the Pi to get reset. With just one servo it might be okay, but once you add a second it will probably be too much for the DC/DC on the ThunderBorg.
While this will probably work with your temporary setup, I do not think it will be good enough for your final setup.
Option 2: Use the BattBorg to power the servos and ultrasonics for the LiPo
This requires a bit of wiring, but it should be the most reliable option. Put simply the idea is to connect the both BattBorg and ThunderBorg V+ / GND to the LiPo. The 5V from the BattBorg can then be used to power the V+ / GND on the UltraBorg.
Start by removing the 5V link jumper. When removed the servos and ultrasonics are only connected to the V+ / GND terminals for power:
Probably the easiest way to wire the BattBorg to the battery is to connect the battery to the V+ and GND screw terminals on the ThunderBorg, then run a red wire between V+ on both boards and a black one between GND on both boards. Make sure both cables are gripped well in the ThunderBorg connectors to get a good power connection.
If you wire the battery to the V+ and GND screw terminals on the ThunderBorg as suggested then the power switch on the ThunderBorg Lid is not used. I would suggest using a switch wired between the positive connection on the battery and V+ on the ThunderBorg as a power switch.
You can instead use the 9V style connector on the ThunderBorg Lid so that the built in power switch works, but you will need to be very careful to get the two connections the correct way around, or it will damage the ThunderBorg!!!
Once that has all been done you need to connect wires from the 6-pin header on the BattBorg to the V+ and GND on the UltraBorg. This will then supply the 5V for the servos and ultrasonics.
Here is a quick diagram of the connections required, including which pins on the 6-pin BattBorg header are needed for the 5V and GND to the UltraBorg. Hopefully that will make things a bit clearer:
JonnyAlpha
Mon, 03/12/2018 - 18:34
Permalink
Once again many thanks for a
Once again many thanks for a super informative reply.
As we need an on /off switch I think I might drill through the + and - PP3 connectors on the ThunderBorg and insert some bolts to hold a couple of crimp connectors.
JonnyAlpha
Wed, 05/02/2018 - 20:26
Permalink
Hi;
Hi;
I spoke to one of you guys at PiWars ref the power setup and possible issues with Servos. I spoke to Tom (I think) who suggested it might be because the BattBorg which I am using to supply power from the LiPo to the UltraBorg may be suffering from noise. Tom suggested that instead of using a BattBorg that I should swap it out for a UBEC. He showed me an example on one of your 'Hot Rod' robots.
I am trying to source a suitable UBEC but can't work out which one I need there are sooooo many. Hobby King source I think he said?
Would you be able to link me the UBEC that I need. I am running a 4S 14.8 Turnigy Lipo
Thanks
Bill H
piborg
Thu, 05/03/2018 - 10:46
Permalink
UBECs
There are quite a number of UBECs available, most of which will do the correct job.
The requirements for the UBEC to power the servos from a 4S LiPo are:
As it happens we have added an appropriate UBEC for this task to our store this week:
Hobbywing 5V 3A UBEC Step-Down Converter
3 A should be plenty for most servo setups, it is double what the BattBorg is capable of :)
JonnyAlpha
Thu, 05/03/2018 - 17:10
Permalink
Well that's handy then 😁 I'll
Well that's handy then 😁 I'll get one on order.
JonnyAlpha
Thu, 12/28/2017 - 16:50
Permalink
Thanks for the reply. I have
Thanks for the prompt reply.
To avoid two separate battery packs (Pi & Motors / Servos) I think we will opt for a 4S LiPo.
This morning I have had the MonsterBorg up and running using a PiHut Wireless GamePad Controller and have now connected the UltraBorg using the servo fly leads supplied with the board. The ThunderBorg is sat on the Raspberry Pi GPIO and the UltraBorg is daisy chained from the ThunderBorg 6 pin header.
I can't seem to find any documentation specific to using the UltraBorg with a ThunderBorg but understand that both need to have different i2c addresses set.
Using terminal with the command i2cdetect -y 1 and it shows two connected devices:
5x10
and
6x30
May I assume that these are the ThunderBorg and the UltraBorg?
piborg
Fri, 12/29/2017 - 12:06
Permalink
ThunderBorg and UltraBorg I2C
You are right, those two devices are the ThunderBorg and UltraBorg with their default I2C addresses:
As the two boards already have different I2C addresses you can use them as they are without having to change anything :)
JonnyAlpha
Fri, 12/29/2017 - 14:08
Permalink
Ran the Servo and Distance
Ran the Servo and Distance Sensor GUI and managed to get both devices working fine - woop woop. Onwards and upwards.