
PiBorg - Control Robots from your Raspberry Pi
This information will remain here for support / archive reasons
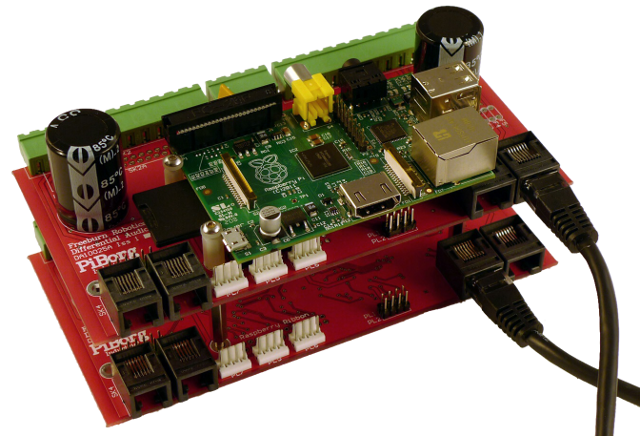
The PiBorg board is an add on board which can be attached to your Raspberry Pi via the 26 way GPIO port. The PiBorg requires a power adaptor (6-24V) and motors or solenoids to control. The PiBorg is capable of controlling the position or velocity of up to two motors per board when a feedback mechanism is attached to the motor such as an encoder or potentiometer.
What else is required
- Raspberry Pi
- Power supply (6-24V)
- Motors
- Cable to connect to your motors
Motion Control Methods
- Open loop control
Control the energy supplied to the motor (motor forward/reverse/off)
- Velocity Control (requires feedback)
Control the velocity the motor turns at and the direction.
- Position Control (requires feedback)
Control the position of the motor and hold this position.
Feedback mechanism may be incremental encoder which supplies a typical 5v quadrature signal or via a potentiometer.
Additional support is planned for Stepper motors and Brushless DC motors, keep an eye out in the forums or in the sourceforge repository for this.
Monitoring
The PiBorg board provides the ability to monitor the drive current and back-EMF voltage to work out the torque and speed of your motors. Additional functionality for this will be included in the repository.
Dimensions
The board is 80mm x 160mm x approx 35mm high with the Raspberry Pi mounted. The cap is the highest object, so additional axis are stacked at least 35mm from each other. The product is designed to fit into an extruded aluminium case (this will be available here soon). There are ample mount holes on the board.
Connections
-
Motor and power connections
The PiBorg provides Phoenix style connectors which allow for easy connection the cables to your motors, power supply, solenoids and feedback. An optional mounting on the PCB allows for DB25 connector to be installed instead of the Pheonix connector. -
Raspberry Pi Connector
The PiBorg has a 26 way connector for connection to your Raspberry Pi via a 26 way ribbon cable. This cable is included in the Primary package. -
Axis Connector
The PiBorg has two connectors - axis in and axis out for daisy chaining PiBorg boards to add more motors to your project. This cable is included when you purchase PiBorg additional boards. -
Programming headers
ICD3 (RJ11) and PICKit 6 pin connectors are included for optional programming the PiBorg with updated versions or your own version of code.

Connector Pinout
Each PiBorg has two Pheonix style connectors with the following pinout
| 1 | 2 | 3 | 4 | 5 | 6 |
| GND | IP1 eg. Encoder A | IP2 eg. Encoder B | IP3 eg. Pot | 3.3V out | Motor + |
| 7 | 8 | 9 | 10 | 11 | 12 |
| Motor - | Solenoid | Power + Out | 5V Out | GND |
Power Connector
| 1 | 2 | 3 | 4 |
| GND | GND | Power (6-24V) | Power (6-24V) |
For example, to simply control a DC motor in open loop, you will only need to connect a power source on pins 1 and 3 of the power connector and a motor on pins 6 and 7.

