
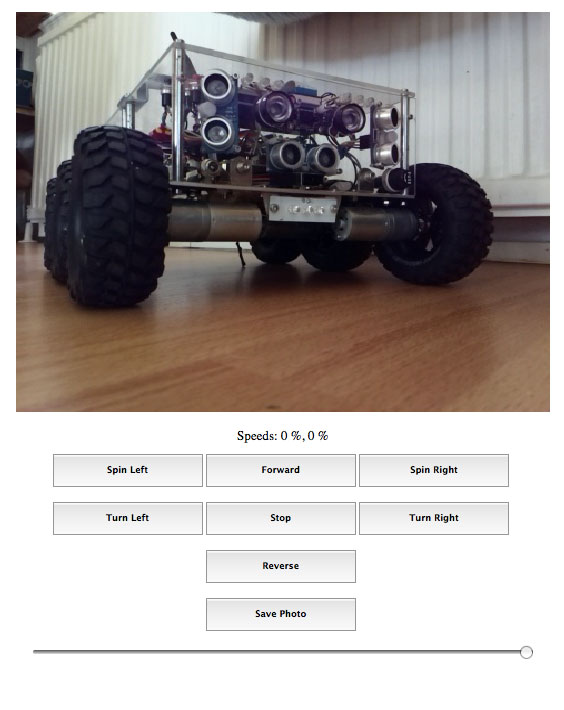
ZeroBorg Web UI
Forums:
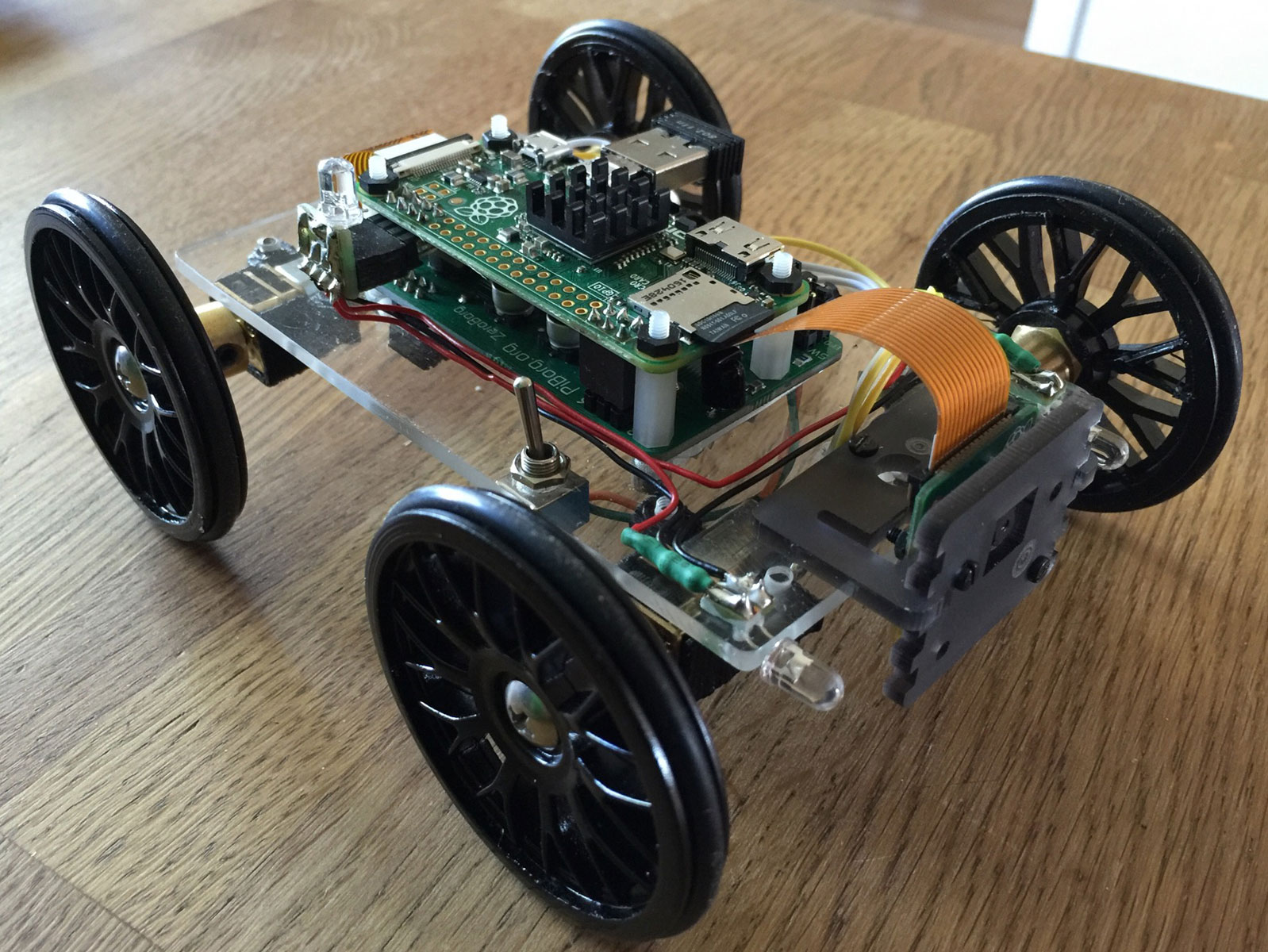
This is a web based interface for controlling your ZeroBorg from a phone or browser.
(Based on DiddyBorg script)
Hope yo like it :-)
#!/usr/bin/env python
# coding: Latin-1
# Creates a web-page interface for ZeroBorg
# Import library functions we need
#import PicoBorgRev
import ZeroBorg
import time
import sys
import threading
import SocketServer
import picamera
import picamera.array
import cv2
import datetime
import RPi.GPIO as GPIO
# Settings for the web-page
webPort = 80 # Port number for the web-page, 80 is what web-pages normally use
imageWidth = 480 # Width of the captured image in pixels 240 368 480
imageHeight = 384 # Height of the captured image in pixels 192 288 384
frameRate = 10 # Number of images to capture per second
displayRate = 2 # Number of images to request per second
photoDirectory = '/home/pi' # Directory to save photos to
# Global values
global PBR
global lastFrame
global lockFrame
global camera
global processor
global running
global watchdog
running = True
# Setup the PicoBorg Reverse
PBR = ZeroBorg.ZeroBorg()
#PBR.i2cAddress = 0x44 # Uncomment and change the value if you have changed the board address
PBR.Init()
if not PBR.foundChip:
boards = ZeroBorg.ScanForZeroBorg()
if len(boards) == 0:
print 'No ZeroBorg found, check you are attached :)'
else:
print 'No ZeroBorg at address %02X, but we did find boards:' % (PBR.i2cAddress)
for board in boards:
print ' %02X (%d)' % (board, board)
print 'If you need to change the I≤C address change the setup line so it is correct, e.g.'
print 'PBR.i2cAddress = 0x%02X' % (boards[0])
sys.exit()
#PBR.SetEpoIgnore(True) # Uncomment to disable EPO latch, needed if you do not have a switch / jumper
PBR.SetCommsFailsafe(False) # Disable the communications failsafe
PBR.ResetEpo()
# Power settings
voltageIn = 9.0 # Total battery voltage to the PicoBorg Reverse (change to 9V if using a non-rechargeable battery)
voltageOut = 7.0 # Maximum motor voltage
# Setup the power limits
if voltageOut > voltageIn:
maxPower = 1.0
else:
maxPower = voltageOut / float(voltageIn)
# Timeout thread
class Watchdog(threading.Thread):
def __init__(self):
super(Watchdog, self).__init__()
self.event = threading.Event()
self.terminated = False
self.start()
self.timestamp = time.time()
def run(self):
timedOut = True
# This method runs in a separate thread
while not self.terminated:
# Wait for a network event to be flagged for up to one second
if timedOut:
if self.event.wait(1):
# Connection
print 'Reconnected...'
timedOut = False
self.event.clear()
else:
if self.event.wait(1):
self.event.clear()
else:
# Timed out
print 'Timed out...'
timedOut = True
PBR.MotorsOff()
# Image stream processing thread
class StreamProcessor(threading.Thread):
def __init__(self):
super(StreamProcessor, self).__init__()
self.stream = picamera.array.PiRGBArray(camera)
self.event = threading.Event()
self.terminated = False
self.start()
self.begin = 0
def run(self):
global lastFrame
global lockFrame
# This method runs in a separate thread
while not self.terminated:
# Wait for an image to be written to the stream
if self.event.wait(1):
try:
# Read the image and save globally
self.stream.seek(0)
flippedArray = cv2.flip(self.stream.array, -1) # Flips X and Y
retval, thisFrame = cv2.imencode('.jpg', flippedArray)
del flippedArray
lockFrame.acquire()
lastFrame = thisFrame
lockFrame.release()
finally:
# Reset the stream and event
self.stream.seek(0)
self.stream.truncate()
self.event.clear()
# Image capture thread
class ImageCapture(threading.Thread):
def __init__(self):
super(ImageCapture, self).__init__()
self.start()
def run(self):
global camera
global processor
print 'Start the stream using the video port'
camera.capture_sequence(self.TriggerStream(), format='bgr', use_video_port=True)
print 'Terminating camera processing...'
processor.terminated = True
processor.join()
print 'Processing terminated.'
# Stream delegation loop
def TriggerStream(self):
global running
while running:
if processor.event.is_set():
time.sleep(0.01)
else:
yield processor.stream
processor.event.set()
# Class used to implement the web server
class WebServer(SocketServer.BaseRequestHandler):
def handle(self):
global PBR
global lastFrame
global watchdog
# Get the HTTP request data
reqData = self.request.recv(1024).strip()
reqData = reqData.split('\n')
# Get the URL requested
getPath = ''
for line in reqData:
if line.startswith('GET'):
parts = line.split(' ')
getPath = parts[1]
break
watchdog.event.set()
if getPath.startswith('/cam.jpg'):
# Camera snapshot
lockFrame.acquire()
sendFrame = lastFrame
lockFrame.release()
if sendFrame != None:
self.send(sendFrame.tostring())
elif getPath.startswith('/off'):
# Turn the drives off
httpText = ''
httpText += 'Speeds: 0 %, 0 %'
httpText += ''
self.send(httpText)
PBR.MotorsOff()
elif getPath.startswith('/set/'):
# Motor power setting: /set/driveLeft/driveRight
parts = getPath.split('/')
# Get the power levels
if len(parts) >= 4:
try:
driveLeft = float(parts[2])
driveRight = float(parts[3])
except:
# Bad values
driveRight = 0.0
driveLeft = 0.0
else:
# Bad request
driveRight = 0.0
driveLeft = 0.0
# Ensure settings are within limits
if driveRight < -1:
driveRight = -1
elif driveRight > 1:
driveRight = 1
if driveLeft < -1:
driveLeft = -1
elif driveLeft > 1:
driveLeft = 1
# Report the current settings
percentLeft = driveLeft * 100.0;
percentRight = driveRight * 100.0;
httpText = ''
httpText += 'Speeds: %.0f %%, %.0f %%' % (percentLeft, percentRight)
httpText += ''
self.send(httpText)
# Set the outputs
driveLeft *= maxPower
driveRight *= maxPower
PBR.SetMotor2(-driveLeft)
PBR.SetMotor3(-driveLeft)
PBR.SetMotor1(-driveRight)
PBR.SetMotor4(-driveRight)
elif getPath.startswith('/photo'):
# Save camera photo
lockFrame.acquire()
captureFrame = lastFrame
lockFrame.release()
httpText = ''
if captureFrame != None:
photoName = '%s/Photo %s.jpg' % (photoDirectory, datetime.datetime.utcnow())
try:
photoFile = open(photoName, 'wb')
photoFile.write(captureFrame)
photoFile.close()
httpText += 'Photo saved to %s' % (photoName)
except:
httpText += 'Failed to take photo!'
else:
httpText += 'Failed to take photo!'
httpText += ''
self.send(httpText)
elif getPath == '/':
# Main page, click buttons to move and to stop
httpText = '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += 'Spin Left\n'
httpText += 'Forward\n'
httpText += 'Spin Right\n'
httpText += '\n'
httpText += 'Turn Left\n'
httpText += 'Stop\n'
httpText += 'Turn Right\n'
httpText += '\n'
httpText += 'Reverse\n'
httpText += '\n'
httpText += 'Save Photo\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
self.send(httpText)
elif getPath == '/hold':
# Alternate page, hold buttons to move (does not work with all devices)
httpText = '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += 'Spin Left\n'
httpText += 'Forward\n'
httpText += 'Spin Right\n'
httpText += '\n'
httpText += 'Turn Left\n'
httpText += 'Reverse\n'
httpText += 'Turn Right\n'
httpText += '\n'
httpText += 'Save Photo\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
self.send(httpText)
elif getPath == '/stream':
# Streaming frame, set a delayed refresh
displayDelay = int(1000 / displayRate)
httpText = '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n'
httpText += '\n' % (displayDelay)
httpText += ' \n'
httpText += '\n'
httpText += '\n'
self.send(httpText)
else:
# Unexpected page
self.send('Path : "%s"' % (getPath))
def send(self, content):
self.request.sendall('HTTP/1.0 200 OK\n\n%s' % (content))
# Create the image buffer frame
lastFrame = None
lockFrame = threading.Lock()
# Startup sequence
print 'Setup camera'
camera = picamera.PiCamera()
camera.resolution = (imageWidth, imageHeight)
camera.framerate = frameRate
print 'Setup the stream processing thread'
processor = StreamProcessor()
print 'Wait ...'
time.sleep(2)
captureThread = ImageCapture()
print 'Setup the watchdog'
watchdog = Watchdog()
# Run the web server until we are told to close
httpServer = SocketServer.TCPServer(("0.0.0.0", webPort), WebServer)
try:
print 'Press CTRL+C to terminate the web-server'
while running:
httpServer.handle_request()
except KeyboardInterrupt:
# CTRL+C exit
print '\nUser shutdown'
finally:
# Turn the motors off under all scenarios
PBR.MotorsOff()
print 'Motors off'
# Tell each thread to stop, and wait for them to end
running = False
captureThread.join()
processor.terminated = True
watchdog.terminated = True
processor.join()
watchdog.join()
del camera
PBR.SetLed(True)
print 'Web-server terminated.'
\n'
httpText += '\n'
httpText += '\n'
self.send(httpText)
else:
# Unexpected page
self.send('Path : "%s"' % (getPath))
def send(self, content):
self.request.sendall('HTTP/1.0 200 OK\n\n%s' % (content))
# Create the image buffer frame
lastFrame = None
lockFrame = threading.Lock()
# Startup sequence
print 'Setup camera'
camera = picamera.PiCamera()
camera.resolution = (imageWidth, imageHeight)
camera.framerate = frameRate
print 'Setup the stream processing thread'
processor = StreamProcessor()
print 'Wait ...'
time.sleep(2)
captureThread = ImageCapture()
print 'Setup the watchdog'
watchdog = Watchdog()
# Run the web server until we are told to close
httpServer = SocketServer.TCPServer(("0.0.0.0", webPort), WebServer)
try:
print 'Press CTRL+C to terminate the web-server'
while running:
httpServer.handle_request()
except KeyboardInterrupt:
# CTRL+C exit
print '\nUser shutdown'
finally:
# Turn the motors off under all scenarios
PBR.MotorsOff()
print 'Motors off'
# Tell each thread to stop, and wait for them to end
running = False
captureThread.join()
processor.terminated = True
watchdog.terminated = True
processor.join()
watchdog.join()
del camera
PBR.SetLed(True)
print 'Web-server terminated.'
Images:
- Log in to post comments

