
BakedPi2 - See how hot your Raspberry Pi is, now with added filtering
The new driver free example which replaces this one can be found here.
BakedPi was good, but did you notice just how much the LedBorg jumps around in colour?
What we need is a filtered version that smoothes those updates down!
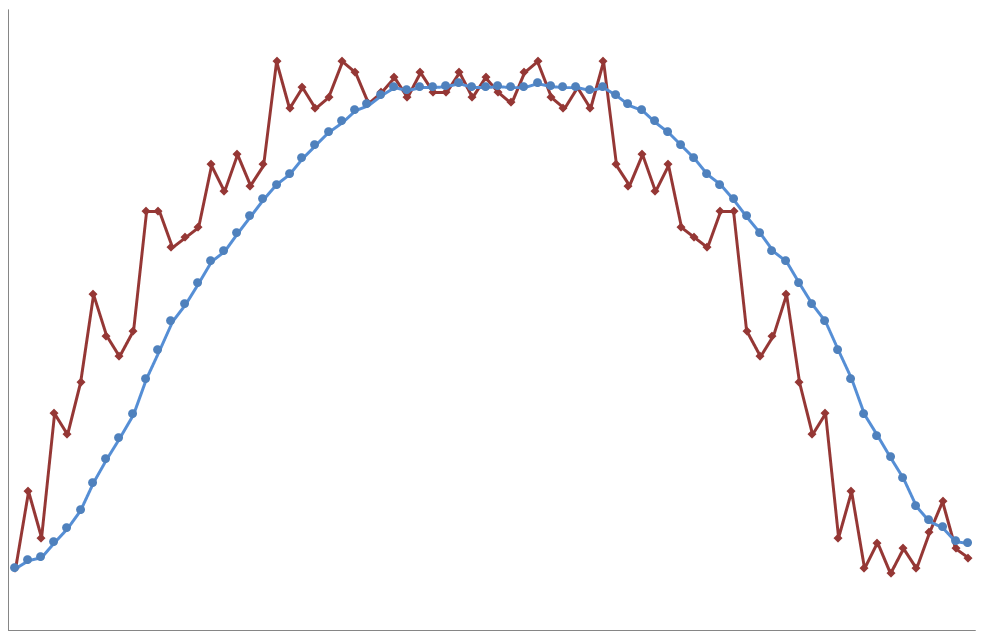
We decided a simple box or flat filter would be well suited for this task.
Put simply the filter takes the average of the last so many readings and uses that as the result for the colour.
The larger the averaging window (number of samples) the more out of date the reading is, but the smoother the display is.
The improved version is BakedPi2.py, a Python script which reads the current processor temperature, filters the reading, and then controls an LedBorg appropriately.
There are a few variables in the scripts you may wish to set to change options:
pathSensor- Line 18, sets the file to read to get temperature, change this if you want to use a different temperature readingreadingPrintMultiplier- Line 19, if you changepathSensoryou may need to change this to print values in a sensible unit (e.g. degrees)tempHigh- Line 20, sets the temperature representing 100% scale, you will probably want to change these to show a better temperature range, since our example uses a value which works well when watching the Raspberry Pi warm up from boottempLow- Line 21, sets the temperature representing 0% scale, you will probably want to change these to show a better temperature range, since our example uses a value which works well when watching the Raspberry Pi warm up from bootinterval- Line 22, time in seconds between readings, smaller will update quicker put use more processor timefilterSize- Line 23, the size of the filter window, larger numbers make the reading smoother, but also cause it to update slower
Here's the code, you can download the BakedPi2 script file as text here
Save the text file on your pi as BakedPi2.py
Make the script executable using
chmod +x BakedPi2.pyand run using
./BakedPi2.py
#!/usr/bin/env python
# coding: latin-1
# Import libary functions we need
import time
# Make a function to set the LedBorg colour
def SetColour(colour):
LedBorg=open('/dev/ledborg','w')
LedBorg.write(colour)
LedBorg.close()
# Set up our temperature chart, from cool to hot
colours = ['002', '012', '022', '021', '020', '120', '220', '210', '200']
# Setup for processor monitor
pathSensor = '/sys/class/thermal/thermal_zone0/temp' # File path used to read the temperature
readingPrintMultiplier = 0.001 # Value to multiply the reading by for user display
tempHigh = 40000 # Highest scale reading
tempLow = 30000 # Lowest scale reading
interval = 1 # Time between readings in seconds
filterSize = 10 # Number of samples for the filter to cover (larger is smoother but slower)
# Box filter class
class BoxFilter:
# Filter storage
oldValues = []
lastIndex = 0
seeded = False
window = 0
average = 0.0
# Filter initialisation
def __init__(self, window):
# Make sure we have at least 1 sample
if window < 1:
self.window = 1
else:
self.window = int(window)
# Make our storage the right size
for i in range(self.window):
self.oldValues.append(0.0)
# Run a new value through the filter
def run(self, newValue):
# Ensure newValue is floating point
newValue = float(newValue)
# Check if we need to 'seed' the filter
if self.seeded:
# Find the next value to replace (the list wraps at the end)
self.lastIndex += 1
if self.lastIndex >= self.window:
self.lastIndex = 0
# Fill in the next value and re-calculate the average
self.average -= self.oldValues[self.lastIndex] / float(self.window)
self.oldValues[self.lastIndex] = newValue
self.average += self.oldValues[self.lastIndex] / float(self.window)
else:
# We have not, fill in all fields
for i in range(self.window):
self.oldValues[i] = newValue
self.seeded = True
# Use the new value as the average
self.average = newValue
# Return the average
return self.average
try:
# Make sure we are using floats
tempHigh = float(tempHigh)
tempLow = float(tempLow)
# Make a new filter
tempFilter = BoxFilter(filterSize)
while True:
# Read the temperature in from the file system
fSensor = open(pathSensor, 'r')
rawReading = float(fSensor.read())
fSensor.close()
# Pass the reading through the filter
reading = tempFilter.run(rawReading)
# Pick the relevant colour
position = (reading - tempLow) / (tempHigh - tempLow)
position = int(position * len(colours))
if position < 0:
position = 0
elif position >= len(colours):
position = len(colours) - 1
# Set the relevant colour
SetColour(colours[position])
# Print the latest reading, both filtered and raw
print '%02.3f (raw %02.3f)' % (reading * readingPrintMultiplier, rawReading * readingPrintMultiplier)
# Wait a while
time.sleep(interval)
except KeyboardInterrupt:
# CTRL+C exit, turn off the LedBorg
print 'Terminated'
SetColour('000')

