
DiddyBorg with a #MeArm attached

Forums:
Here is our software example for using a #MeArm and DiddyBorg from the same PS3 controller.
Parts
In order to run this script you will need:
You will need to alter the top plate of the DiddyBorg so that the #MeArm can be attached.
Servo connections
Connect the #MeArm servos to these ports on the UltraBorg:
- left / right
- up / down
- forward / backward
- claw open / close
The second BattBorg should be used to connect 5v from the 6-pin header into the 2-pin screw terminals on the UltraBorg.
Remember to make sure the jumper on the UltraBorg is removed!
After the servos are attached use the UltraBorg tuning GUI to setup the #MeArm movement ranges.
Do not leave the servos "under strain" for long periods of time, otherwise you may damage them.
Controls
The controls are based on the standard diddyJoy.py script with some new additions: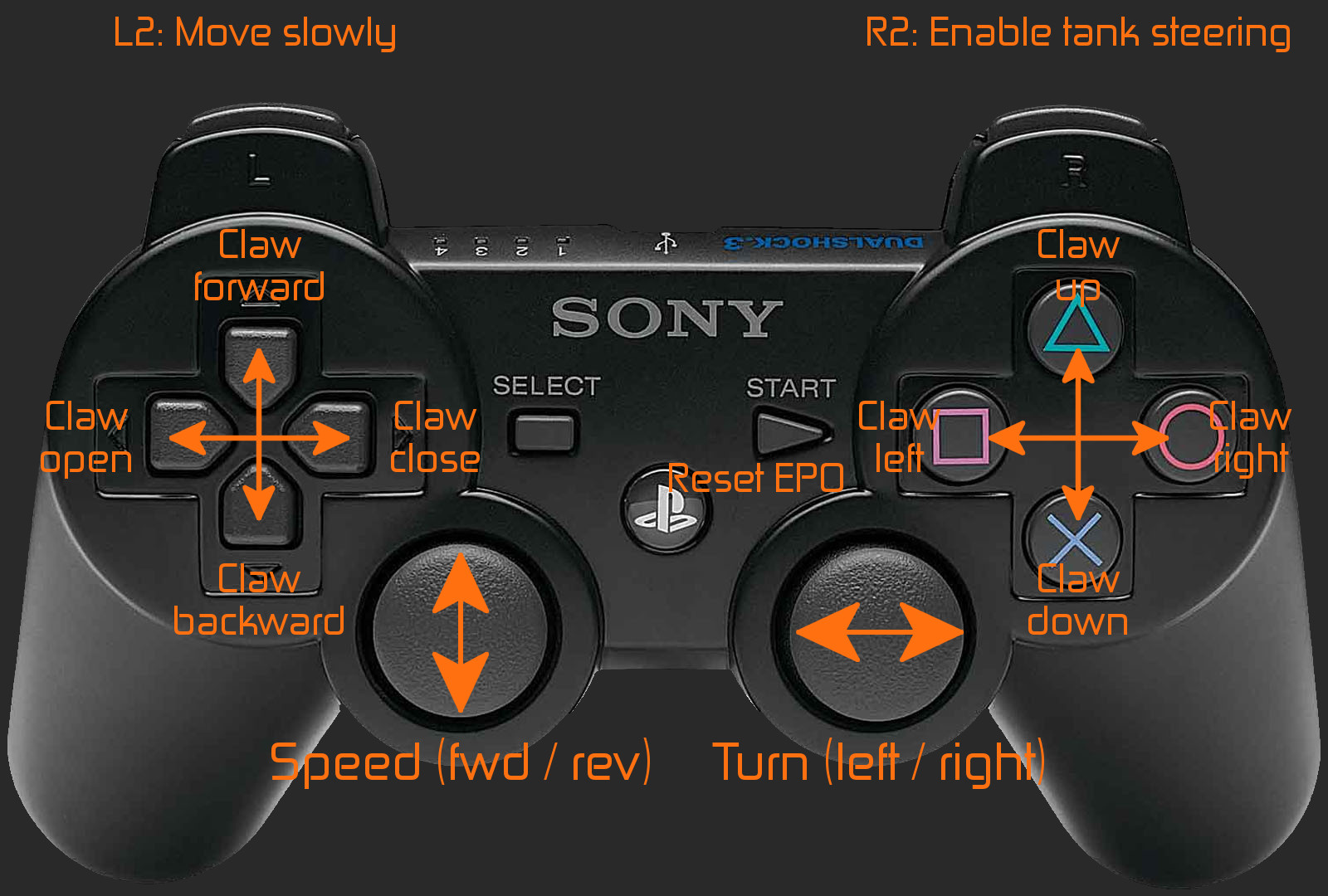
Tapping the #MeArm movement buttons will make small movements.
Holding the #MeArm movement buttons will make faster movements.
When the "move slowly" button (L2) is held both the motors and #MeArm will move slower.
Again do not leave the servos "under strain" for long periods of time, otherwise you may damage them.
Software installation
After getting your DiddyBorg working you can install the additional #MeArm code using:bash <(curl https://www.piborg.org/install-diddyborg-mearm.txt)
Alternatively you can get the source code here:
http://www.piborg.org/downloads/diddyborg/mearm.zip
Run once
Go to the DiddyBorg code directory:cd ~/diddyborg
if you are using a PS3 controller and need to start the sixad process use the PS3 launcher:./ps3DiddyJoyClaw.sh
otherwise run the script using the simple launcher:./runDiddyJoyClaw.sh
Run at startup
Open crontab to make an addition using:crontab -e
this will open the scheduled task list in your default text editor (usually nano).
If you are using a PS3 controller add the following line to the bottom of the file:@reboot /home/pi/diddyborg/ps3DiddyJoyClaw.sh
if you are not then add the following line instead:@reboot /home/pi/diddyborg/runDiddyJoyClaw.sh
the script should now run whenever the Raspberry Pi is restarted / powered up.
- Log in to post comments

